Here's what we do!
Our locomotion research explores the intersection of mechanical design, control theory, and machine learning. We're building legged robots from the ground up—designing custom mechanisms, developing simulation environments, and training reinforcement learning policies that transfer from simulation to reality.
Each project represents a different aspect of this journey: from single-leg prototypes that validate our kinematics, to fully indigenous quadrupeds built with open-source tools, to commercial platforms that let us test our AI controllers in the real world.
Flea
Single Leg Mechanism - A part of Rumi
Our leg mechanism was designed using CadQuery, a powerful open-source CAD framework that enables parametric 3D modeling through Python scripting.
We are currently 3D printing our prototype and are using Dynamixel MX-64 motors for actuation.
Photos





Videos

Rumi
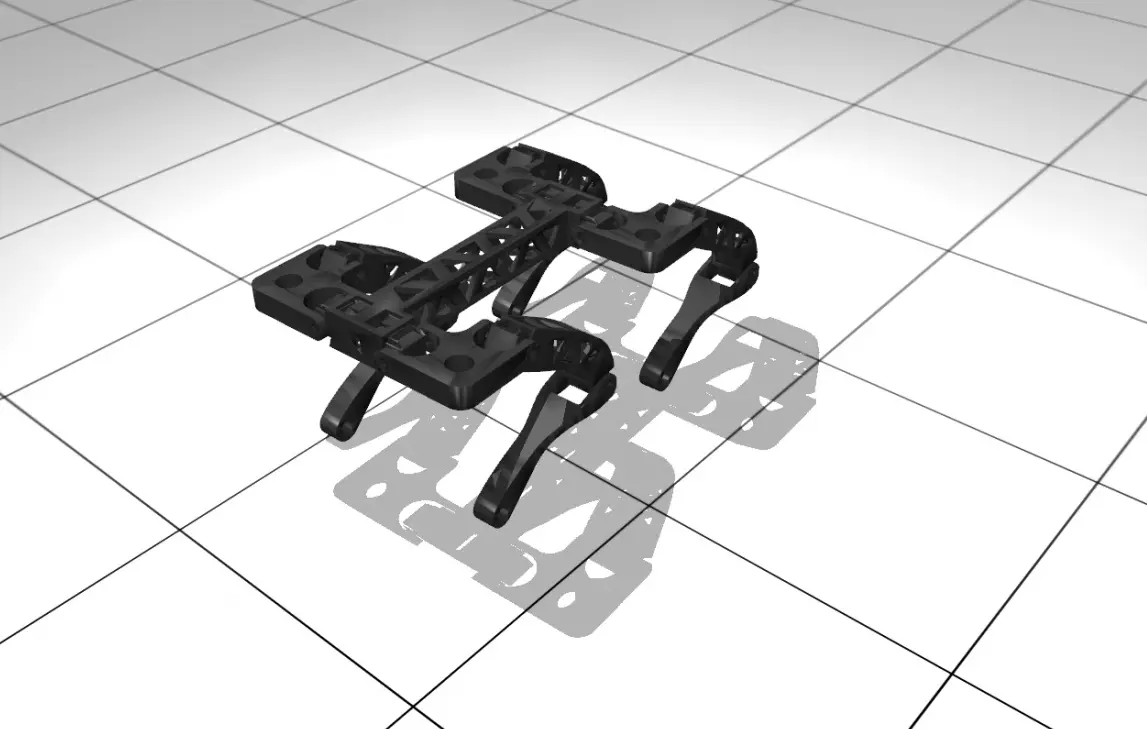
Indigenous Quadruped Prototype
Our indigenous quadruped prototype, still under development. Rumi represents our commitment to building capable legged robots using open-source tools and locally sourced components.
Photos

Videos

DeepRobotics Lite3
RL Policy Testing Platform
The robot on which we test our reinforcement learning policies. The Lite3 serves as our validation platform for testing algorithms trained in simulation.
Photos

Videos
Open Source Tools
Timeline
Rumi Policy Training
October 2025
Leg Designing and Sim2Real
October 2025
Lite3 Policy Training
September 2025
Revised CAD Design
August 2025
CAD Design - Earliest Prototype
August 2025
Project Inception
July 2025